Ich wollte schon immer einen Programmer für DCC Decoder haben, damit ich nicht jedes Mal auf der Anlage arbeiten muss. Fertige Programmer sind mir aber stets zu teuer gewesen. Inzwischen habe ich mich ein wenig intensiver mit dem DCC-EX Projekt beschäftigt.
Das DCC-EX Projekt stellt die nötige Software und Expertise kostenlos zur Verfügung um aus weit verbreiteter günstiger Hardware eine voll funktionsfähige DCC Digitalzentrale selber zu bauen. In der Grundausstattung wird die Zentrale drahtlos per kostenloser App gesteuert und bietet sogar einen Programmiergleis- Ausgang. Als Hardware kommen die weit verbreiteten Arduino Microcontroller zum Einsatz, die man für einstellige Euro Beträge bekommen kann.
Im bekannten Stummi- Forum, in dem sich nicht nur die vielen Märklin Fans “herumtreiben”, sondern auch eine große Gruppe von echten Cracks, wenn es um den Selbstbau von Modellbahn- Elektronik geht, bin ich über ein Projekt gestolpert, das die DCC-EX Software auf einem ESP 32 statt einem Arduino verwendet. Der ESP 32 ist deutlich leistungsstärker als die gängigen Arduino Modelle und hat obendrein WLan und Bluetooth integriert. Das erleichtert die Konfiguration, da man sonst für WLan eine eigene Hardware benötigt. Daneben bietet der ESP 32 genug Ressourcen, so das man Automatik- Funktionen, die sonst einen PC an der Anlage benötigen würden, gleich direkt in der Zentrale ausführen kann.
Es gibt auch ESP 32 Boards, die im selben Formfaktor wie die sehr verbreiteten Arduino UNO Boards gehalten sind. Hier passen dann auch Erweiterungen, die für Arduino UNO gedacht sind. Genau so ein Board in Kombination mit einem Standard- Motorshield (als Booster) kommt hier zum Einsatz.
Man bekommt solche Boards auch hier in Europa, aber leider nur sehr viel teurer als bei Bestellung direkt in China. Hergestellt werden sie sowieso ausschließlich in China. Vor ca 2 Wochen habe ich drei ESP 32, drei Motorschields und eine Hunderterpackung Widerstände des Werts, den man als einzige externe elektronische Komponente benötigt. Das reicht, um gleich drei DCC Zentralen zu bauen. Bei AliExpress bekommt man ganz oft kostenlosen Versand bei Bestellungen über 10€ pro Händler. Damit ich diesen kostenlosen Versand in Anspruch nehmen konnte, habe ich eben gleich drei Exemplare bestellt. Insgesamt habe ich incl. Versand und Steuern 24,80€ bezahlen müssen. Das sind knapp 8,30€ pro DCC Zentrale. Kaum zu unterbieten, denke ich. Ein System wird als Programmer dienen. Ein weiteres wird mit einem 43 Ampere (ja, 43 nicht 4,3) Motorschield ausgestattet und soll, natürlich beim Strom begrenzt, als Zentrale für meine in Planung befindliche Regelspur Anlage dienen. 43 Ampere ist selbstverständlich viel zu viel für eine Modellbahn. Das muss man unbedingt begrenzen. Aber das 43 Ampere Motorshield kostet keine 10€ und ist deswegen vom Preis- Leistungsverhältnis her nicht zu schlagen, selbst wenn man nur gut 10% der möglichen Leistung abruft. Damit kommt die “Großbahn- Zentrale” mit fast unbegrenzt verfügbarer Leistung (hängt fast nur vom Netzteil ab, wie viel Strom man aufs Gleis bekommt) auf nicht mal 20€
Heute ist die Bestellung aus China angekommen. Als erstes habe ich mal die DCC-EX Software über den Installer, den man auf der Webseite downloaden kann, aufgespielt. Dazu muss man den ESP 32 nur mit einem Micro USB Datenkabel mit einem Windows, Linux oder MacOS PC verbinden. Datenkabel ist wichtig, denn es gibt auch viele Micro USB Ladekabel, über die man nur Strom aber keine Daten transportieren kann. Mit einem reinen Ladekabel funktioniert es nicht.
Der Installer wird gestartet und installiert dann einiges an Software, die erst aus dem Internet geladen werden muss. Je nach Geschwindigkeit der Internet Anbindung können auch schon mal 30 – 45 Minuten vergehen, bis alles fertig ist. Gleich zu Anfang muss man die “Arduino CLI” installieren. Das sind Tools, mit denen man auf den Arduino zugreifen kann. In unserem Fall muss man danach auch noch die Unterstützung für den ESP 32 installieren, was noch mal eine ganze Weile dauert.
Ist das geschafft, wählt man das verwendete Microcontroller Board aus. Der ESP 32 wird nur selten mal automatisch erkannt. Deswegen müssen wir wissen, welcher COM Port vom ESP 32 erzeugt wird. Unter Windows kann man das im Gerätemanager heraus finden. Bei mir war es COM 5. Das wird aber bei jedem ein andere Port sein. Mal wählt also den passenden COM Port aus und anschließend “ESP 32 Dev Kit” als “Device”. Wenn die Frage nach dem Motorshield kommt, muss man das Standard Motor Shield auswählen. Nun gelangt man auf ein Fenster, in dem man auswählen kann, was man installieren will. Wir benötigen natürlich die DCC-EX Command Station. Dazu noch einige Konfigurationseinstellungen und die Software wird auf den ESP 32 gespielt.
Wer hier Probleme hat oder es genauer wissen will, kann alles im oben verlinkten Stummiforum Beitragsstrang nachlesen.
Der ESP 32 erzeugt, wenn er erst mal mit der DCC-EX Software bespielt wurde, ein Wlan Netzwerk, in das man sich mit einem Smartphone einloggen kann. Ein kurzer Test mit der Engine Driver App lieferte sofort eine Verbindung zur DCC-EX Zentrale.
Als nächstes muss jetzt das Motorshield vorbereitet werden. Hier wird ein Widerstand und drei Drahtbrücken benötigt. Außerdem muss man drei Beine wegbiegen oder abkneifen, mit denen das Schild eigentlich auf den ESP 32 gesteckt wird. Dazu beim nächsten Mal mehr. Denn das ist mir zu “fummelig” um es fliegend am Schreibtisch zu machen.
Aus einem der drei Systeme will ich einen mobilen DCC Programmer machen, wie aus der Überschrift ersichtlich. Dazu wird das Ganze in ein 3D Druck Gehäuse eingebaut, auf dessen Oberseite eine MagSafe Halterung für ein Smartphone eingebaut wird. MagSave ist ein recht neuer Standard für eine magnetische Befestigung eines Smartphones. Ursprünglich von Apple entwickelt, um damit auch gleich ein kabelloses Aufladen des Handys zu ermöglichen, gibt es inzwischen unzählige Anwendungen, meist im Bereich der Handy- Halterungen. Man kann jedes Smartphone zumindest für die MagSafe Halterung kompatibel machen. Dazu braucht man entweder eine entsprechende Handy Hülle oder einen kleinen Metallring, den man auf die Rückseite des Handys klebt. Diese Ringe sind selbstklebend und nur wenige Zehntelmillimeter dick. Außerdem kosten sie fast nichts. Das (an sich ausrangierte) und mit MagSafe nachgerüstete Smartphone wird als Bildschirm und Steuerung des Programmers verwendet. Ob ich auch gleich eine Lade- Vorrichtung für das Smartphone mit integriere, weiß ich noch nicht.
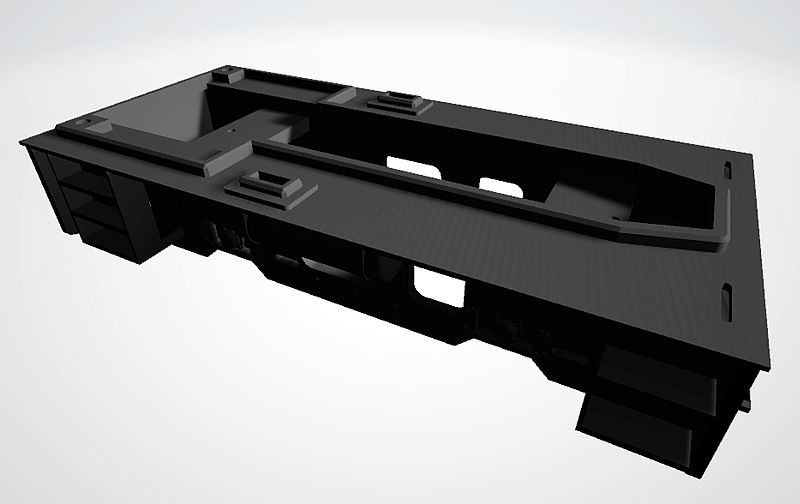
Da ich noch etwas Zeit am Schreibtisch hatte, habe ich angefangen das Gehäuse für den zukünftigen Programmer zu konstruieren. Für die “Füße” habe ich eine auf Thingiverse frei verfügbare OpenSCAD Bibliothek verwendet. Das eigentliche Gehäuse wird aber selbst konstruiert, da herkömmliche Gehäuse den Arduino nicht mit einem Smartphon koppeln.
Als Länge für mein Gehäuse habe ich 16 cm angesetzt, als Breite 8 cm. Diese Maße habe ich von meinem sehr durchschnittlichen Smartphone abgeleitet. Aber selbst wenn das eigene Smartphone deutlich größer oder auch kleiner ist, kann es dank MagSafe trotzdem genutzt werden. Es muss auch kein neues, teures Smartphone sein. Ein altes, Ausrangiertes, das ungenutzt herum liegt, tut es genau so gut. Die Höhe habe ich auf 6 cm festgelegt, damit noch genug Luft um den ESP32 und das Motor Shield bleibt.
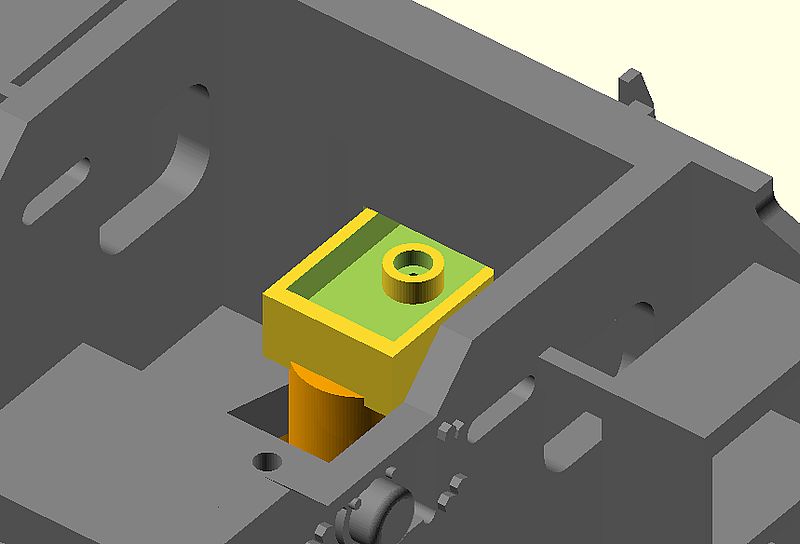
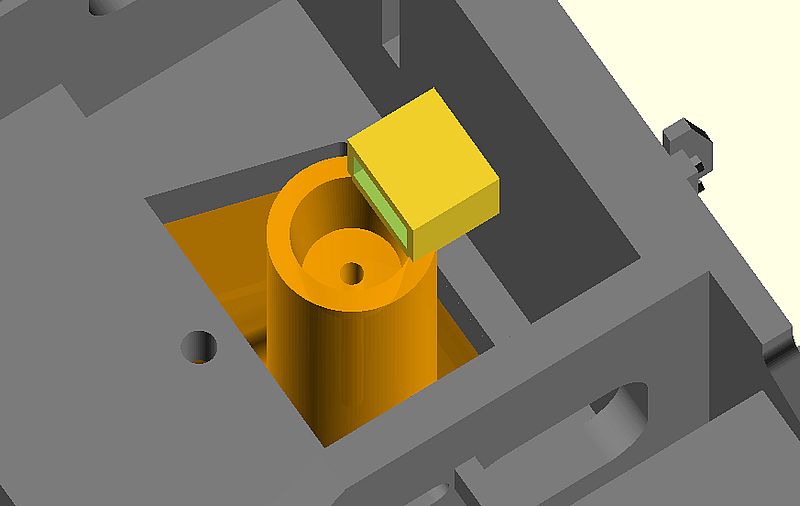
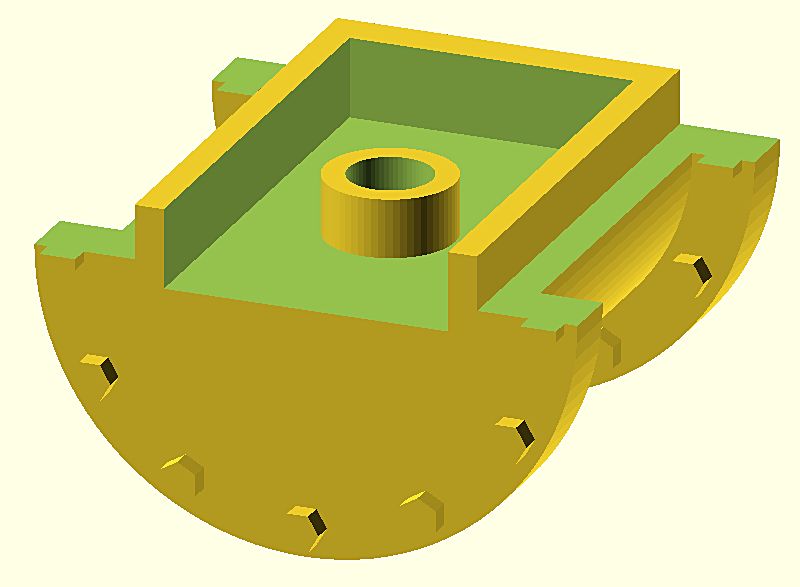
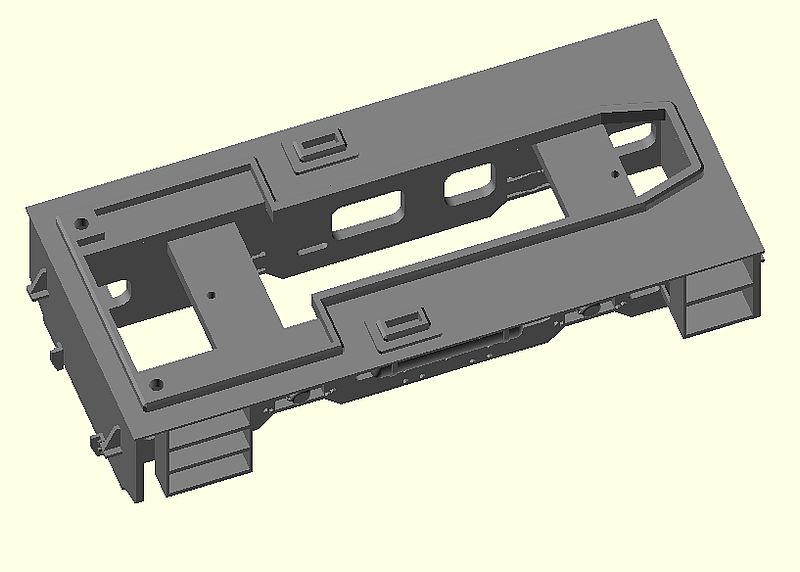
Ich habe zuerst die Grundplatte gezeichnet und darauf die Füße incl. Clip Verbindungen gesetzt.
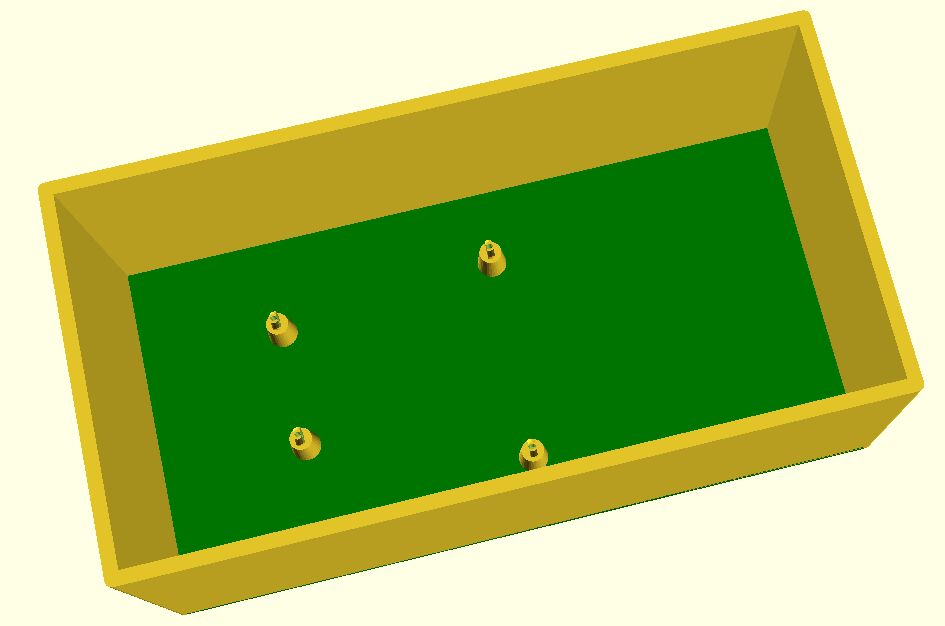
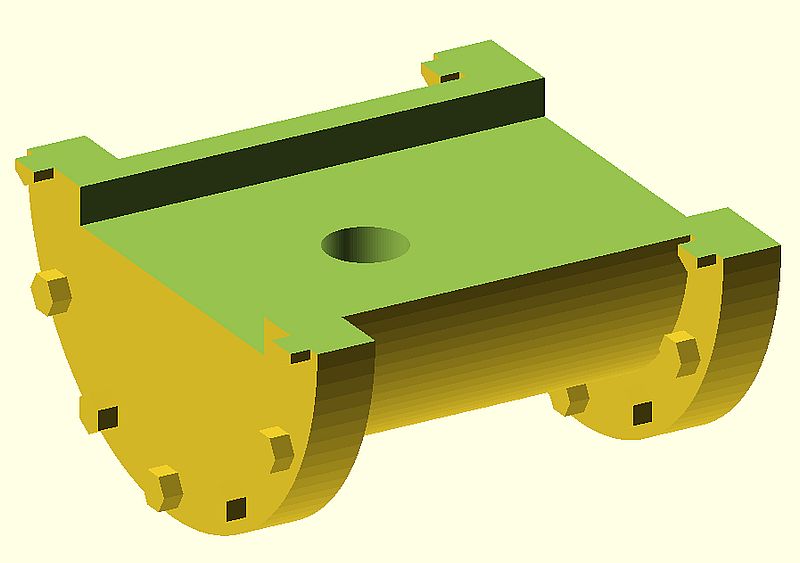
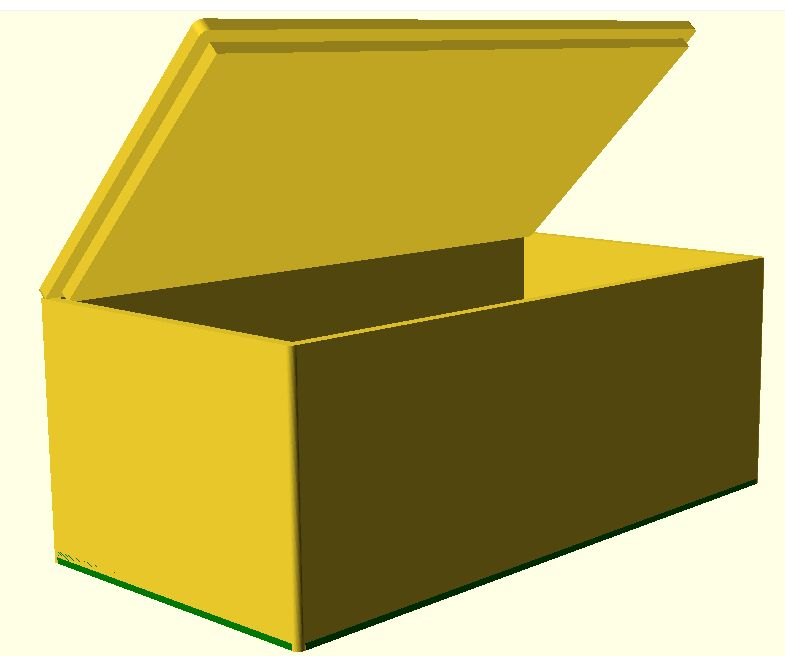
So kann man später die Elektronik einfach einstecken. Danach war der “Kasten” rundherum dran, und der Deckel.
Der Deckel soll einfach aufgelegt werden und etwas klemmen, damit er nicht so leicht von alleine “abhaut”.
Da ich mir noch nicht sicher bin, ob ich sowohl das Programmiergleis als auch das Hauptgleis nach außen führe und auch nicht, ob ich eine Lademöglichkeit für das Handy einbauen will, habe ich noch keine Öffnungen dafür vorgesehen. Das kommt noch, Außerdem werde ich im oberen Bereich diverse Luftlöcher vorsehen, damit die Wärme abziehen kann. Und die Magnete für die MagSave Halterung werden auch noch integriert.
An einem reinen Programmer muss man eigentlich keine zwei Gleisanschlüsse haben. Aber da der zweite Anschluss intern ohnehin vorhanden ist, kann man den Anschluss auch raus führen und den Programmer dann auch gleich als “richtige” Zentrale verwenden.
Inzwischen habe ich auch den Kleinkram zusammen gesucht, der zum Komplettieren benötigt wird. Jetzt kann ich also eine Stückliste machen. Preise sind Momentaufnahme am 13.9.2024
Benötigt wird:
1 x ESP32 Board. 3,15€
1x Motor Shield. 3,95€
1 x Widerstand 270 Ohm (1/8 Watt ist genug) 0,01€
1x USB Ladebuchse mit Spannungswandler fürs Smartphones. 0,34€
1x Lautsprecher Terminal für die Gleisanschlüsse. 0,70€
1x DC Stromversorgungsbuchse. 0,15€
1x Spannungsquelle 12-15 Volt ca 2-4 Ampere. 4,29€
12x Neodym Magnet 3×1 mm. 0,60€ für 12 Stück
1x Gehäuse 3D Druck. Selbst gedruckt etwa 3,00€ (Resin) oder 1,50€ (FDM)
Macht zusammen 16,19€ incl Gehäuse, Stromquelle und USB Ladegerät. Etwas Litze und zwei kleine selbstschneidende Schrauben sollte wohl jeder Modellbauer auf Vorrat haben, denke ich. Die DC Buchse sollte man natürlich passend zum verwendeten Netzteil auswählen. Diese Buchsen gibt es in verschiedenen Varianten. Am gängigsten sind 5,5 x 2,5 und 5,5 x 2,1 mm Durchmesser. Welche man benötigt, steht entweder am Netzteil oder man probiert es aus. Der Innendurchmesser ist nur schwer zu messen. Da ist “Try and Error” einfacher.
16,19€ muss man nur bezahlen, wenn man gar nichts davon vorrätig hat. Netzteile, Stromanschlüsse, Magnete, Widerstände usw. stammen bei mir aus dem Fundus. Mich kostet der Programmer deswegen nur etwa 10€… Die oben angegebenen Links sind nur als Beispiel zu verstehen.
Dazu kommt noch ein (altes) Smartphone, welches man ggfs. mit einem MagSave Ring nachrüsten muss. So ein Ring kostet etwa 0,50€. Wie hoch man die Kosten für das Smartphone ansetzen muss, kann nur jeder für sich selbst entscheiden. Hat man keines, weder eines in Gebrauch noch ein altes, das irgendwo in einer Schublade herum liegt, kann man ein nagelneues, für unsere Zwecke geeignetes Smartphone ab gut 30€ bekommen. Gebrauchte Geräte gibt es entsprechend günstiger. Aber die allermeisten Leute sollten ein Smartphone besitzen, das man dafür nutzen kann. Zur Not kann man das Telefon auch ohne den Magsafe Ring einfach aufs Gehäuse legen. Dann muss man auch keine Magnete in den Deckel kleben.
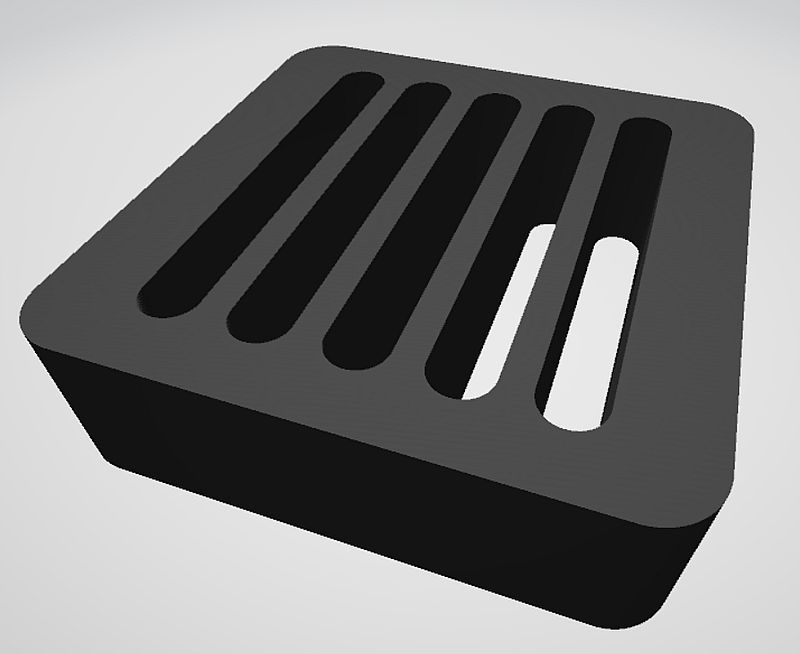
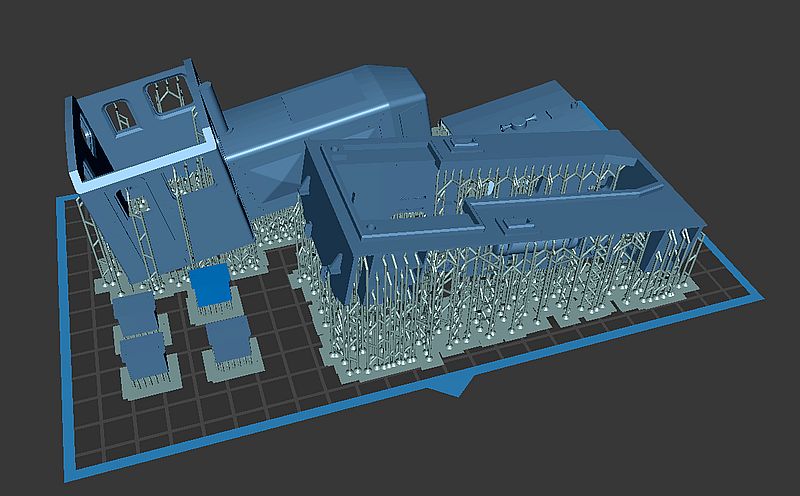
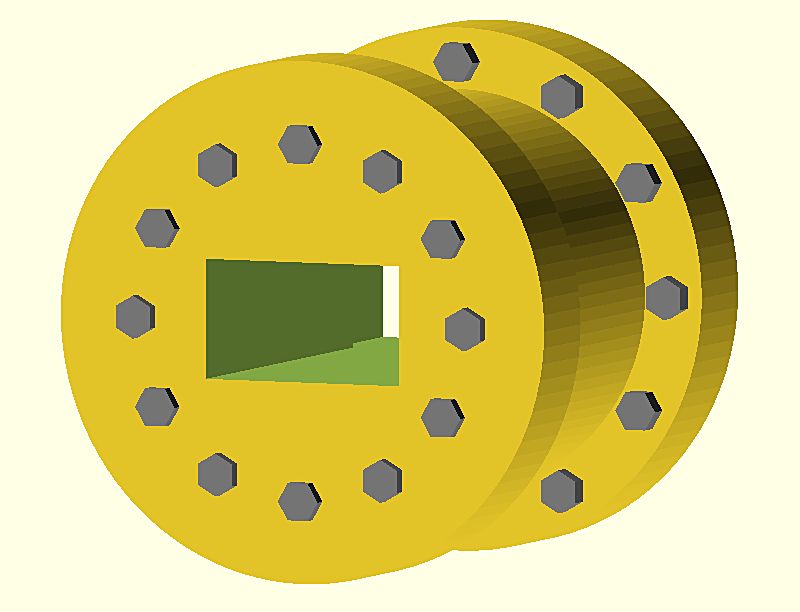
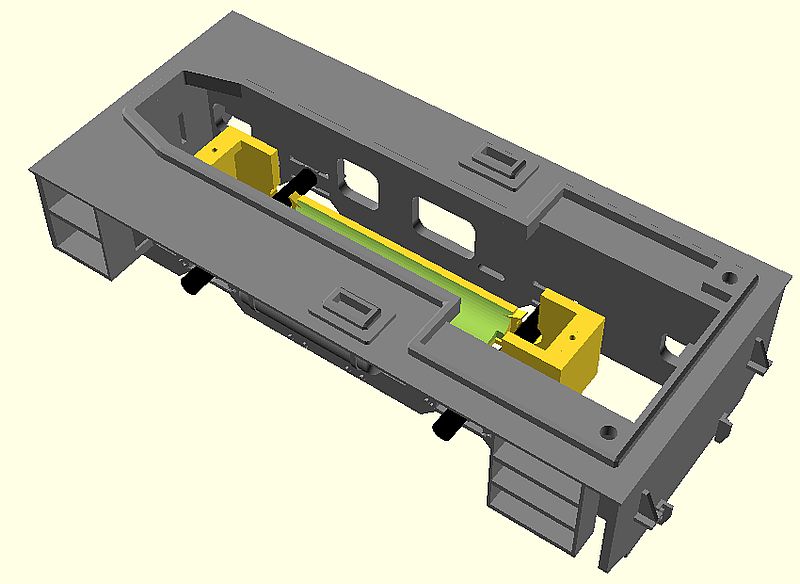
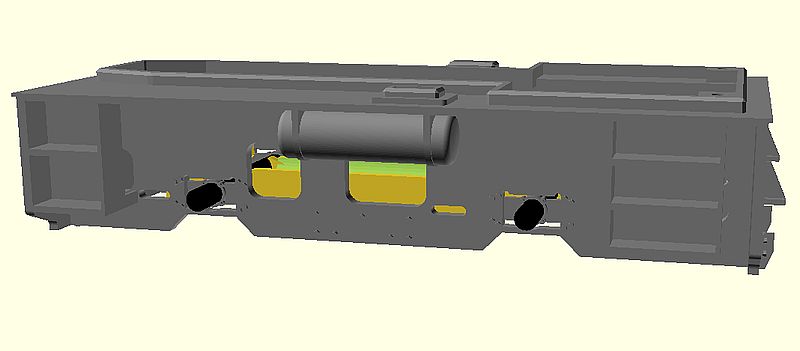
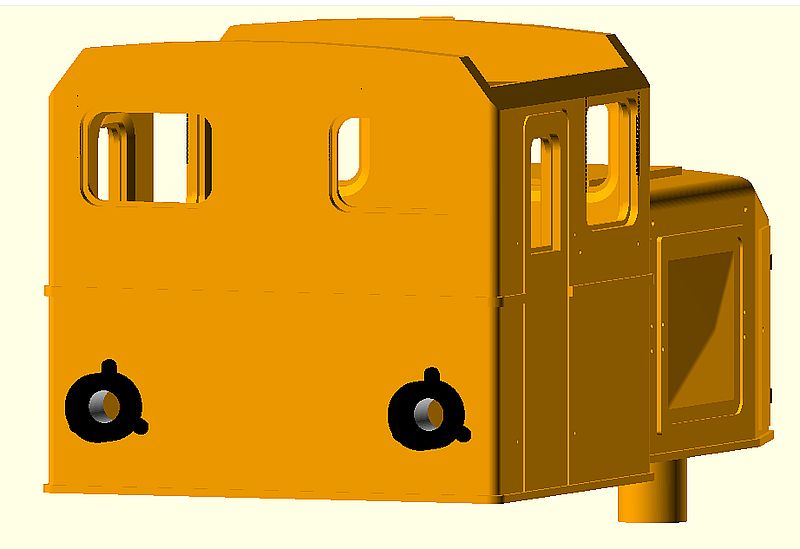
Auch bei der 3D Konstruktion fürs Gehäuse bin ich weiter gekommen.
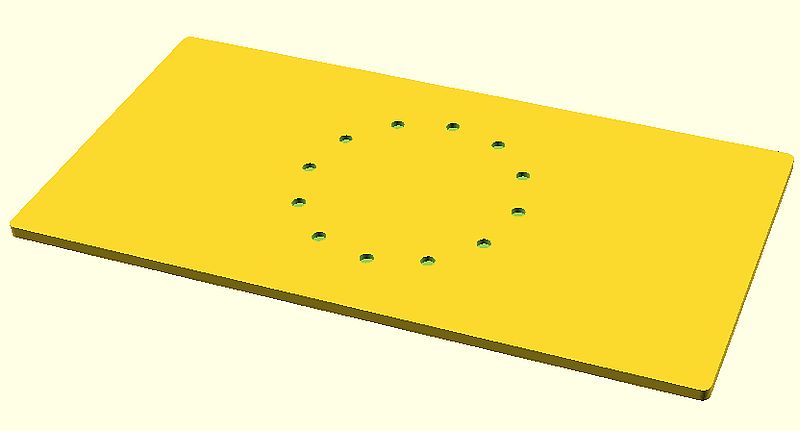
Im Deckel sind jetzt Aussparungen für die Magnete, die dann das Handy mit dem MagSafe Ring auf dem Programmer festhalten.
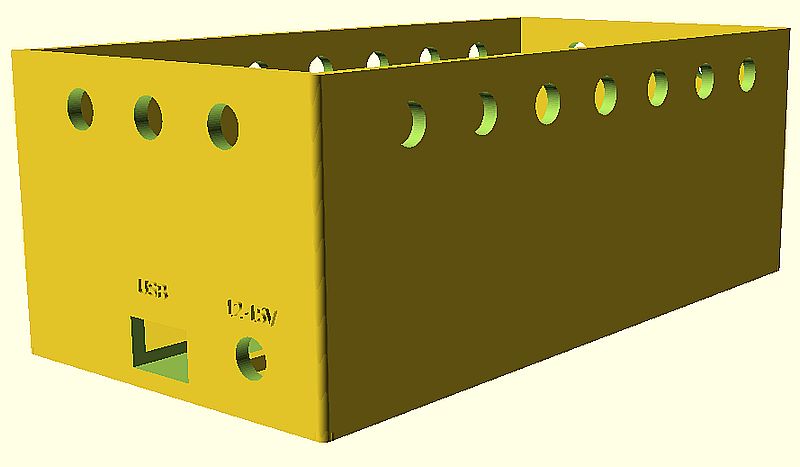
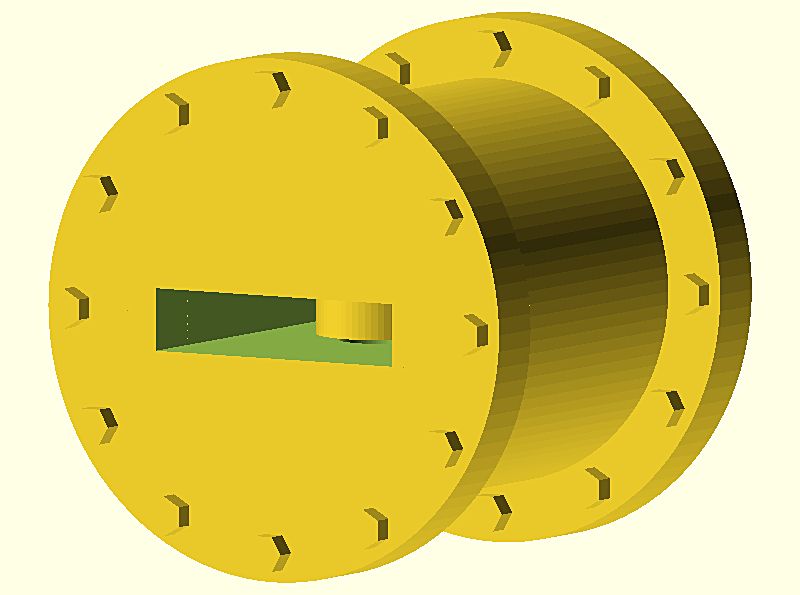
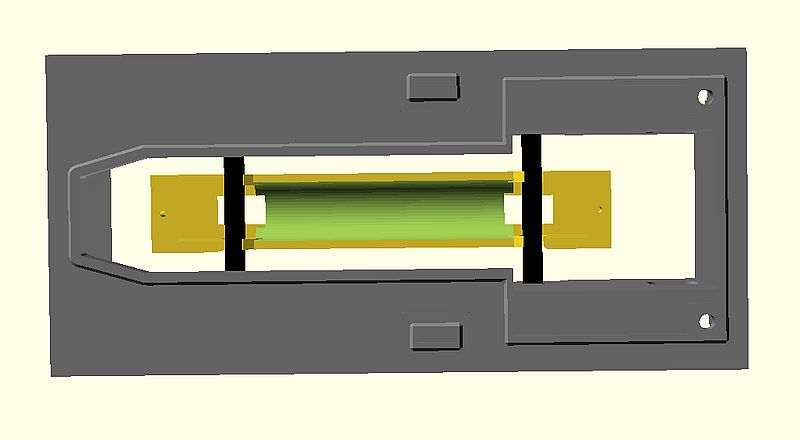
Im Gehäuse sind rundherum Belüftungsöffnungen, die ein Überhitzen der Elektronik verhindern sollen. Auf einer Schmalseite des Gehäuses ist die Stromversorgung für den Programmer (eine typische DC Rundbuchse) sowie per USB zum Laden des Smartphones vorgesehen. Der USB Anschluss ist nicht dazu geeignet, den ESP32 zu programmieren. Dazu muss man die interne Buchse auf der Platine des ESP 32 verwenden. Die externe Buchse dient rein als Ladeanschluss fürs Handy. Alte Handys haben oft keine besonders gute Akku- Laufzeit mehr, da ist eine feste Stromversorgung durchaus von Vorteil.
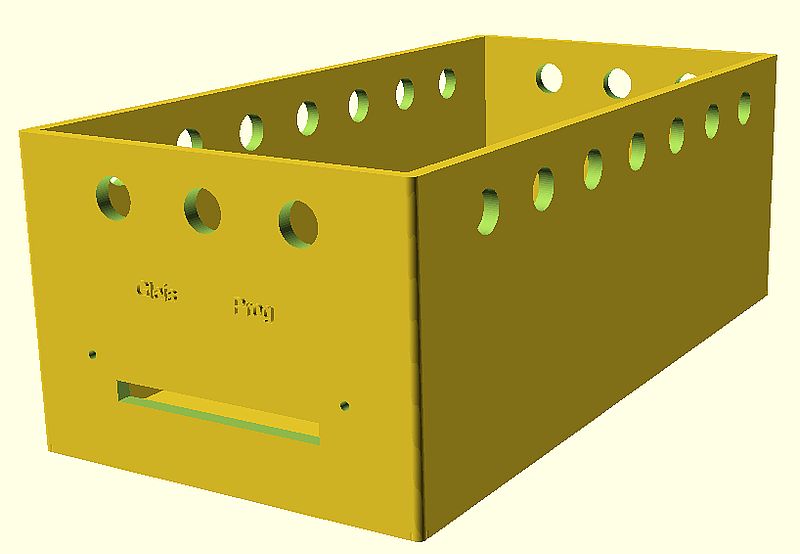
Auf der anderen Schmalseite wird die Lautsprecherklemme als Anschluss- Terminal für Programmiergleis und Hauptgleis montiert. Das Terminal wird mit 2 selbstschneidenden Schrauben festgeschraubt, nachdem man die Kabel zu den Anschlussklemmen des Motorschields angelötet hat.
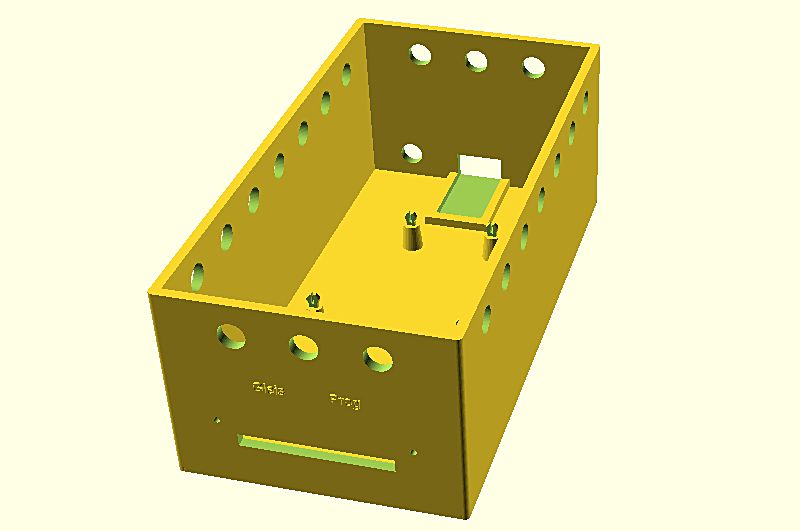
Im Inneren ist noch der Rahmen für die USB Ladeplatine hinzugekommen.
Als nächstes steht jetzt ein Probedruck des Gehäuses an. Wenn da alles passt, stelle ich die STL Dateien zum Download zur Verfügung. Dan kann auch die Endmontage und ein erster Test erfolgen.
Eine Kleinigkeit will ich dann doch noch zusätzlich einbauen. Verteuert den Programmer noch mal um 0,60€. Dafür muss man zum Programmieren den ESP32 nicht mehr aus dem Gehäuse ausbauen. Ich habe Micro USB Einbaubuchsen mit einem kurzen Stück Kabel und Stecker dran gefunden und gleich bestellt. Das baue ich auch noch ins Gehäuse, so das man von Außen jederzeit die Firmware aktualisieren kann. Somit verzögert sich der Probedruck um ein paar Tage.