
Ich kann aktuell nichts drucken, da mir ein paar Verschleißteile des Druckers fehlen, die im Moment in Europa kaum aufzutreiben sind. Also beschäftige ich mich einfach mal ein wenig mit der CAD.
Für 0e gibt es zwar einige fertige motorisierte Fahrwerke, die aber oft zu kleine Räder und/oder zu große Preise haben. Daneben sind die möglichen Achsstände auch eingeschränkt. Speziell bei längeren Achsständen, wie sie bei Triebwagen vorkommen, gibt es fast gar nichts zu kaufen. Alte H0 Schätzchen wie den Piko VT 135 bekommt man zwar, aber der Antrieb ist dann so klobig, das man kaum noch eine Inneneinrichtung in den Triebwagen hinein bekommt. Was mir vorschwebt, ist ein Antrieb, der (fast) komplett in und unter dem Rahmen verschwindet. So etwas gibt es fertig nicht, also muss ich meine grauen Zellen entsprechend quälen.
Als erstes stand die Suche nach einem passenden Motor auf dem Programm. Bei Aliexpress bin ich dann fündig geworden in Form eines 816 D Glockenanker- Motors für 3-12 Volt Betriebsspannung. Der Motor kostet knapp 4€ und es gibt ihn in zwei Geschwindigkeiten. Die langsame Variante liefert 13500 U/min, die Schnelle 18000 U/min. Die kraft des Winzlings recht locker aus für einen Triebwagen, der höchstens mal 1 oder 2 Anhänger ziehen muss… Als Räder dachte ich an die leicht und günstig zu bekommenen 14,1mm Hornby Räder, die ich sowieso (fast) immer vorrätig habe. Die Größe entspricht in 1:45 etwa 650mm Vorbildgröße. Ein durchaus gängiges Maß bei Triebwagen.
Bei einer Getriebe- Übersetzung von 1:18 (Schnecke mit einem 18 Zähne Schneckenrad) und dem “langsamen” Motor ergibt sich mit den 14,1 mm Rädern eine Vorbild- Höchstgeschwindigkeit von knapp 100 km/h bei 12 Volt. Bei Akku- Betrieb sind das dann nicht mal mehr 40 km/h. Deswegen werde ich wohl die 18000 U/min Variante einsetzen. Schließlich ist selbst das Schweineschnäuzchen schon 56 km/h schnell… Bei 12 Volt wird der Antrieb mit dem “schnellen” Motor dann 133 km/h schnell. Das ist für ältere Triebwagen sicher zu viel, doch bei Akku- Betrieb passt das mit etwa 50 km/h dann ziemlich gut.
Um kein zu riesiges Schneckenrad zu bekommen, wurde als Modul M0.4 ausgewählt. Das Schneckenrad mit 18 Zähnen hat dann 8 mm Durchmesser, was hinter den 14 mm Rädern gut funktionieren sollte.
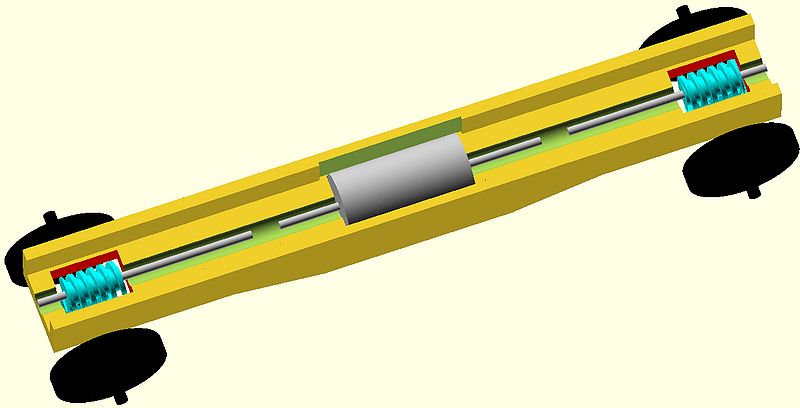
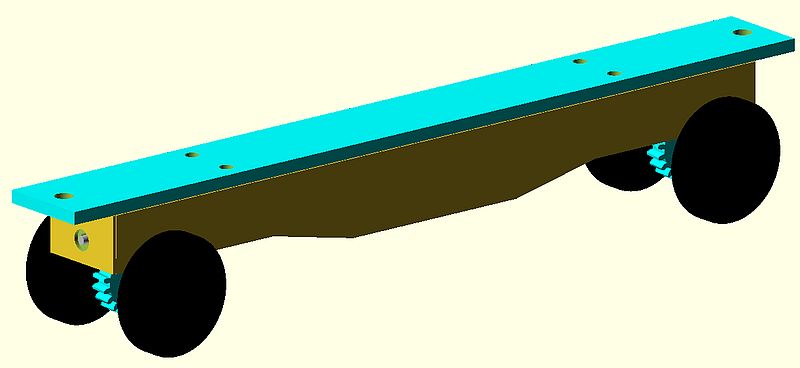
Die Getriebeteile habe ich eben schnell mit der an anderer Stelle bereits erwähnten OpenSCAD Bibliothek erstellt. Dann habe ich den Motor zwar nur grob, aber mit seinen exakten Abmessungen erstellt. Um die Schnecken und den Motor passend auszurichten, habe ich zunächst die Wellen deutlich zu lang gemacht. So ließ sich alles zueinander genau ausrichten.
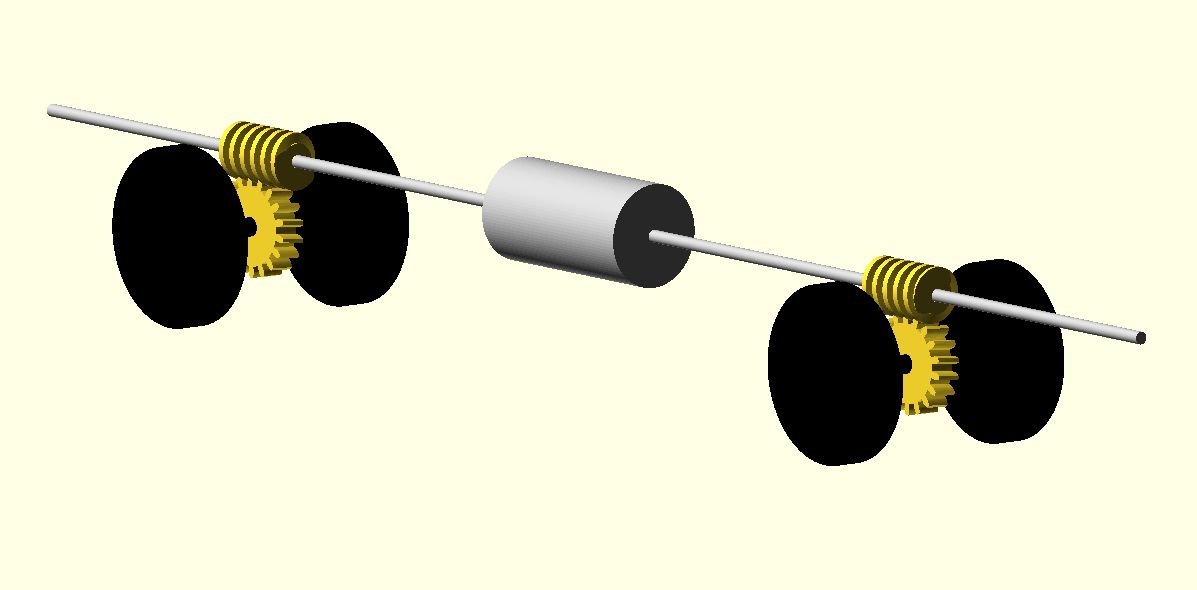
Die schwarzen Scheiben stellen die Radsätze dar, hier im Abstand von 80mm angeordnet. Den Abstand kann man aber relativ leicht auf andere Maße einstellen. Auch lässt sich das Fahrwerk später mit längeren Achsen problemlos für 0m und sogar 0 Regelspur verwenden. Schließlich muss man die Radscheiben (zumindest eine) sowieso von den Achsen abziehen und später wieder aufschieben. Sonst bekommt man die Schneckenräder nicht montiert. Dann kann man auch gleich eine längere Achse verwenden. Ist ein Abwasch.
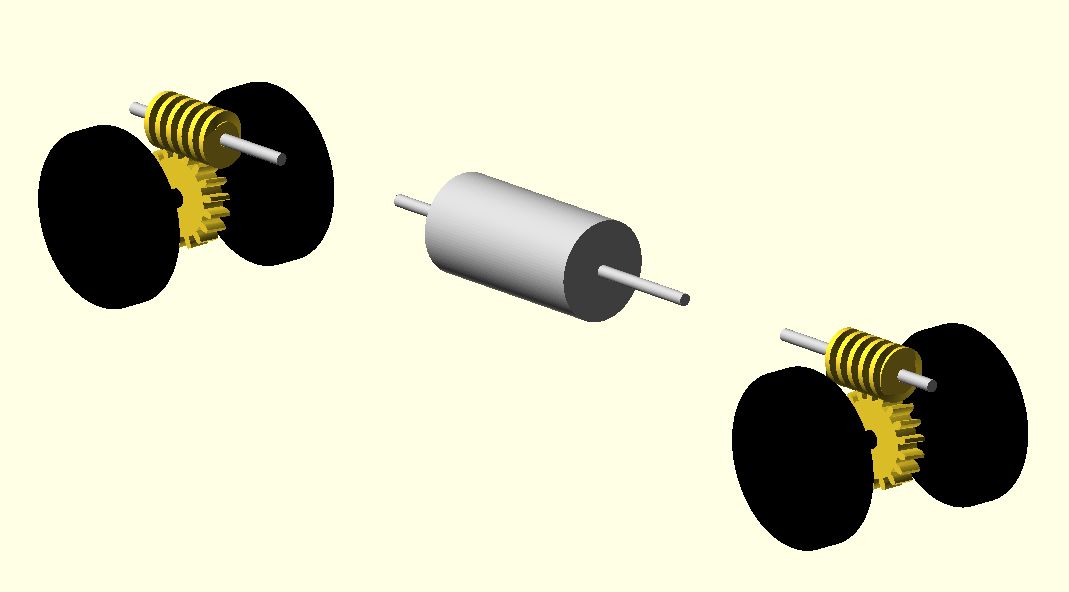
Nachdem ich die Motor- Wellen wieder auf das “echte” Maß gebracht habe, sieht man das sich doch Lücken zwischen den Motor- und Schnecken- Wellen ergeben. Da ich den Motor wohl verkleben werde, macht eine starre Verlängerung z.B. mit einem Messingrohr nicht ganz so viel Sinn, Ich werde einen Silikonschlauch verwenden, der kleine Höhen und Längen- Differenzen problemlos ausgleichen kann. Die Schnecken- Wellenstücke sollen mit Mini- Kugellagern befestigt werden. Eigentlich hatte ich das gleiche auch mit den Radsätzen vor. Aber ich bin mir nicht ganz sicher, ob das geht, weil ich befürchte, die Kugellager tragen zu dick auf. Außerdem soll eine Achse pendelnd gelagert werden, damit man eine Dreipunkt- Auflage bekommt. Für die Leute mit Schienenstrom werde ich Aufnahmen für 2,5 mm Kugelkontakte vorsehen, wie es sie z.B. bei Schnellenkamp gibt. Ich werde selbst aber sicher keine einbauen..
Eigentlich schon “bekloppt”. Alles, was ich bis hierhin konstruiert habe, wird später nicht mit gedruckt. Die Schnecken und Schneckenräder will ich zwar auch drucken, aber separat. Der Rest dient nur dazu, die eigentlichen Druckteile konstruieren zu können. So weit erst mal für heute.
Inzwischen habe ich angefangen, die ersten “bleibenden” Teile zu konstruieren.
Zunächst mal die Lagerschale für den Motor. Er hat etwas “Luft” , da ich ihn ja mit Zweikomponentenkleber einkleben will. Glockenanker- Motoren sind wartungsfrei. Das sollte also für eine ganz lange Zeit ausreichen.
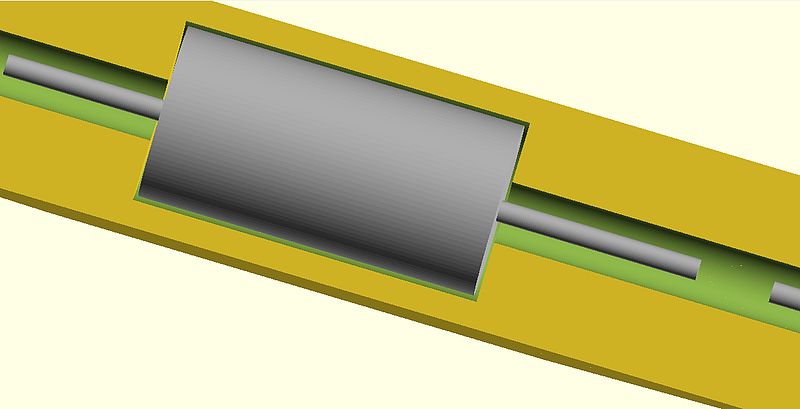
Hier sieht man den Spielraum. Wenn ich das Fahrwerk drucken kann, werde ich sehen, ob das Spiel so passt oder zu viel bzw. zu wenig ist. Ich habe auch die Schneckenwellen entsprechend verlängert, damit die Schlauchkupplung aus Silikon keine weiten Strecken überbrücken muss.
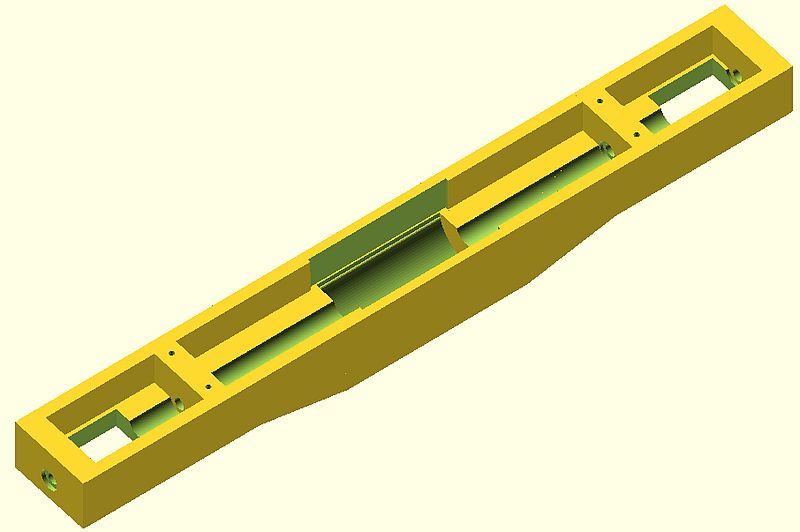
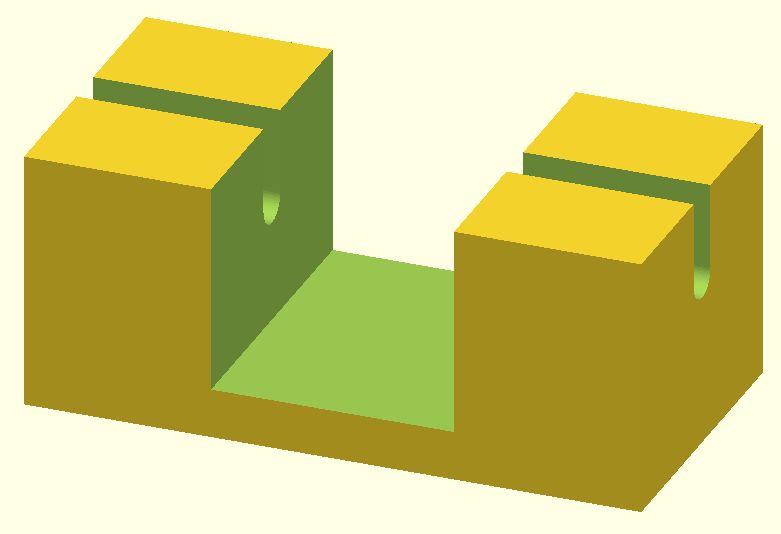
Danach habe ich die Längsträger konstruiert und die Motor- Lagerschale integriert. Außerdem habe ich Aussparungen für die Schnecken vorgesehen. Als nächstes kommen jetzt die Lagerböcke für die Schneckenwellen dran.
Ich habe mich umentschieden und mich gegen Kugellager sondern für Sinterlagen entschieden. Sinterlager sind wartungsfrei, selbst schmierend und deutlich kompakter als Kugellager, die ab und an etwas Fett benötigen. Zum Glück gibt es sowohl für die 1,0mm Schneckenwellen als auch für die 1,5mm Achsen passende Sinterlagerbuchsen zu kaufen.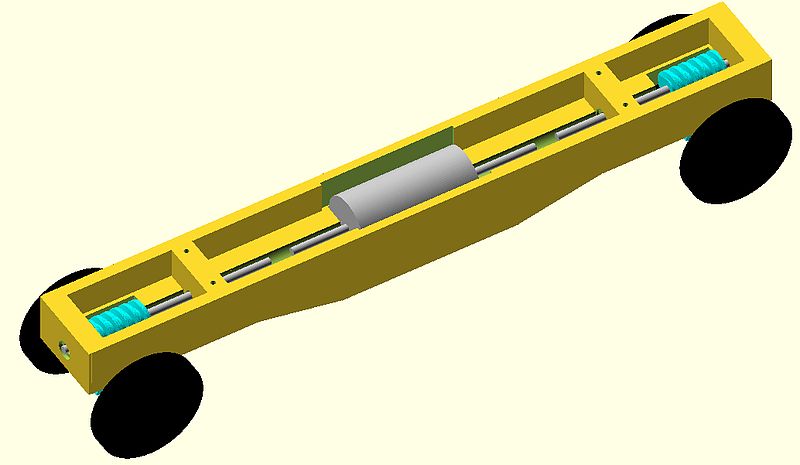
In den beiden inneren Lagerböcken sind Bohrungen für 1,5 mm Schrauben, mit denen die Abdeckung am eigentlichen Träger angeschraubt wird.
In der Abdeckung sin zwei 2mm Löcher vorgesehen, mit denen man das komplette Fahrwerk an das Fahrzeug schrauben kann. Wäre mein Drucker schon wieder einsatzfähig, könnte ich die Abdeckung sogar schon mal drucken. Viel ändern wird sich daran nicht mehr.
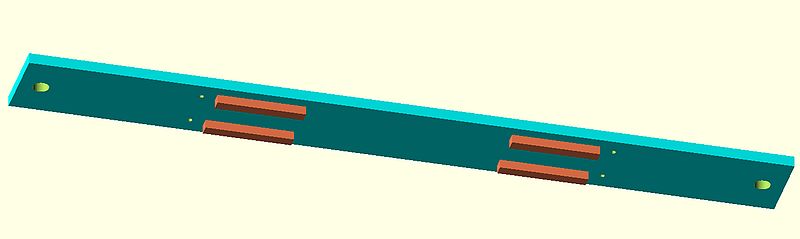
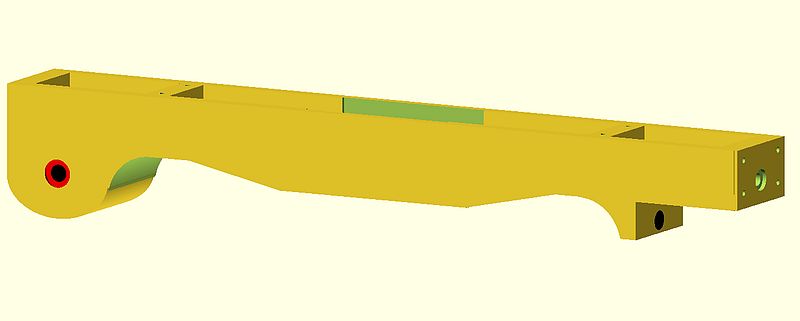
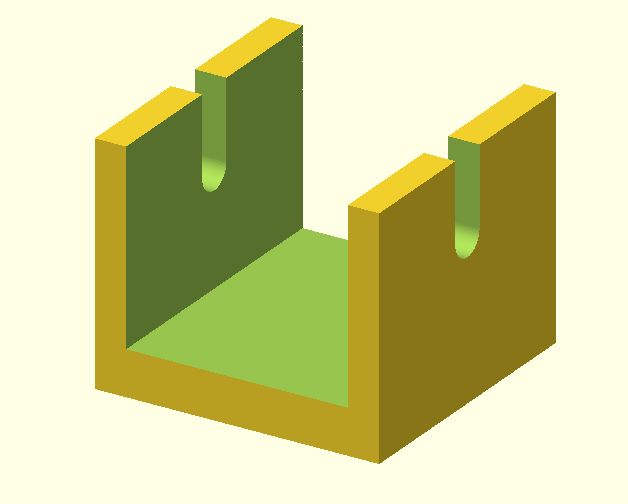
So sieht der eigentliche Träger aus, ohne die “technischen” Komponenten.
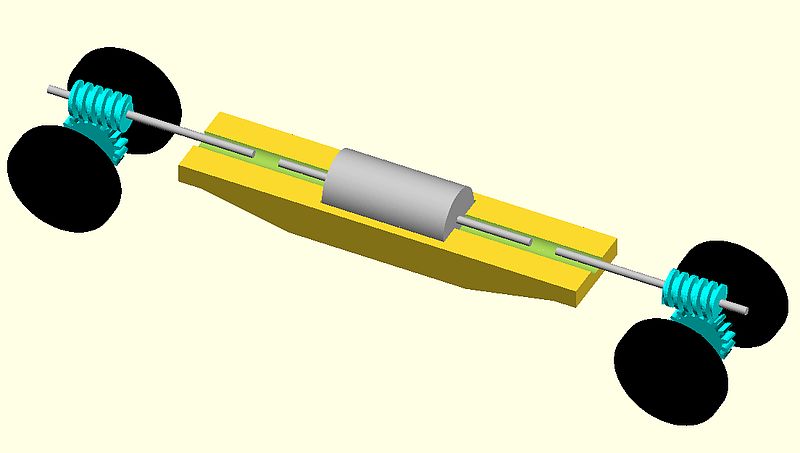
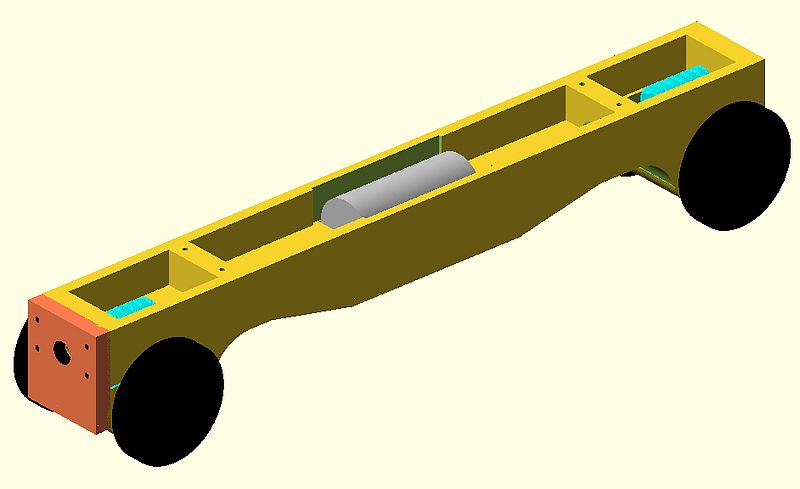
Und so, das “virtuell montierte” Fahrwerk.
Als nächstes kommen dann die Achslager dran, mit den Abdeckungen für die Zahnräder und der einseitigen Pendel-Achse. Das ist dann der nächste Konstruktions- Abschnitt.
Heute war mir ein wenig langweilig im Büro, ich war ganz alleine, da alle Kollegen außer Haus unterwegs waren. Deswegen habe ich weiter am Antrieb konstruiert. Bis ca Mitte April sollten alle Teile (hoffentlich auch die Drucker- Verschleißteile) da sein, um einen ersten Versuch starten zu können.
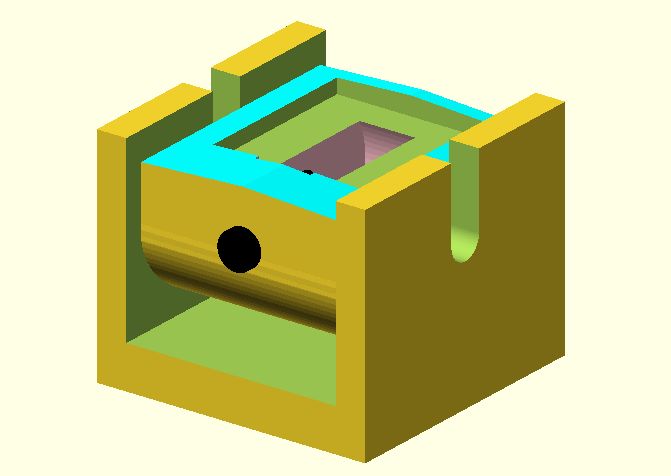
So sieht es jetzt ohne Deckel aus. Der “Coral” -farbene “Klotz” wird nach der Montage der Achse angeschraubt, um ein leichtes Pendeln der Achse zu ermöglichen.
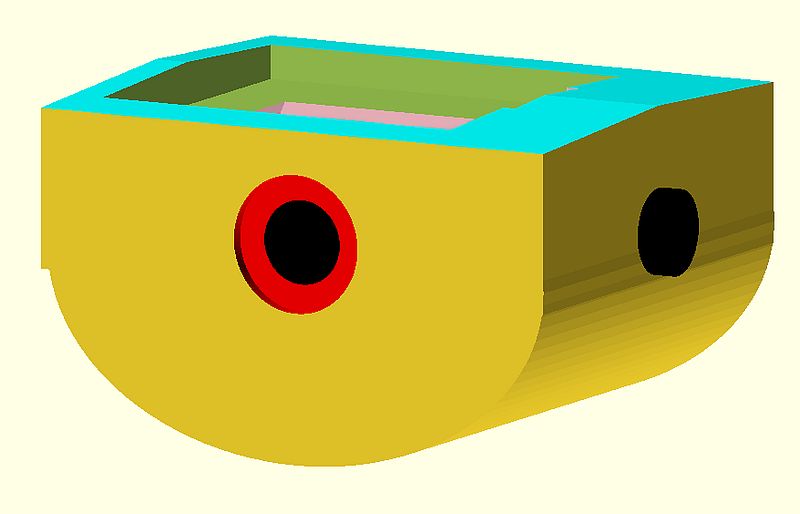
Dieses Teil ist das Pendel- Lager. Der rote Bereich ist für die Sinterlager der Achsen gedacht und der schwarze “Knubbel” nebenan greift in Löcher im Rahmen, damit sich die Achse ein wenig bewegen kann. Deswegen ist auch die Oberseite nicht eben, sondern leicht abgeschrägt. Das Grundprinzip habe ich bei der Roco Köf 3 abgekupfert, bei der die Dreipunkt- Auflage auf vergleichbare Art hergestellt wird.
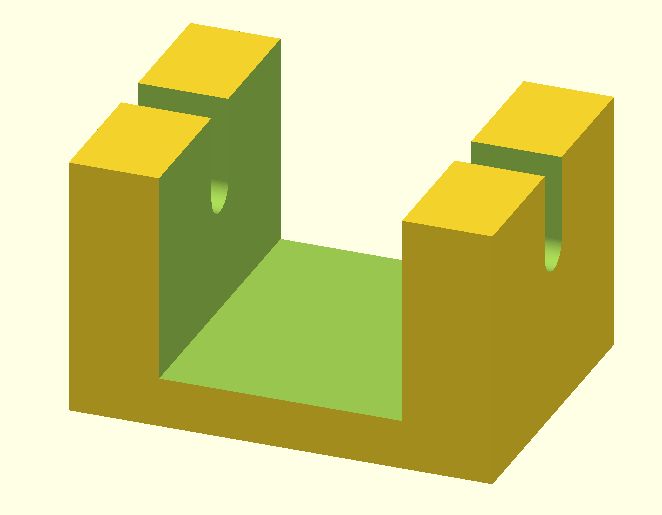
So sieht jetzt der eigentliche Rahmen aus. man erkennt gut die (linke) starr gelagerte Achse und die Halterung rechts für die Pendelachse.
Ich bin ja mächtig gespannt, ob das alles tatsächlich so funktioniert, wie ich mir das ausgedacht habe.
Eine Kleinigkeit fehlt noch. Man muss ja zur Montage des Schneckenrads mindestens eine Radscheibe von der Achse abziehen und später wieder aufpressen. Damit man dabei das Radsatz- Innenmaß einhält, ist es am besten, eine entsprechende Lehre dafür zu haben. Nun, das ist kein großer Aufwand.
Hier ist zur Veranschaulichung das Pendel-Lager mit dargestellt. Die Breite der Lehre entspricht genau dem Innenmaß der 16,5mm Radsätze laut NEM. Man muss also nur die Radscheiben so weit auf die Achse schieben, bis sie an der Lehre anliegen.
So sieht das Teil solo aus, wie es später gedruckt wird.
Eine Variante für 0m, genauer sogar zwei Varianten, für 22,2 und 22.5 mm Spurweite sind auch vorgesehen.
Selbst eine Variante für 0 Regelspur ist noch möglich. Aber bei noch größeren Spurweiten werden wohl langsam sowohl der Motor als auch die 1,5 mm Achsen und H0 Radscheiben an ihre Grenzen kommen. Der Antrieb ist ja für die 14,1 mm Hornby 00 Radsätze vorgesehen. Für größere Spurweiten als 16,5 mm muss man sich selbst aus 1,5 mm Stahldraht neue Achsen passender Länge zuschneiden. Kleinere Spurweiten (13,3 oder gar 12 mm) sind nicht möglich. Dafür ist das Fahrwerk zu breit…
Hallo,
durch den Packwagenumbau bin ich auf dich aufmerksam geworden. Die Teile habe ich für einen Hobbykollegen gedruckt, Filament, Düse 0,2 mm. Er ist mit der Qualität zufrieden.
Ich finde es besonders anerkennenswert, dass du die ganze OpenSCad-Programmierung offenlegst. Da kann man etwas lernen.
Zu dem Triebwagenantrieb mit durchgehender Schneckenwelle: Ich hatte seinerzeit Fahrzeuge von BTTB mit ähnlicher Konstruktion; da liefen die Schneckenwellen an den Enden gegen kleine Kugeln, um die Längskräfte aufzufangen. Bei meinem Fama/Utz-Traktor dienen kleine Stahlplatten dazu. Ob das nun wirklich nötig ist, weiss ich nicht. Du kannst ja darüber nachdenken.
Viele Grüße
Wilfried
Hallo!
Die Umbausätze für die MT-Wagen sind einsame Spitzenklasse und ich habe schon ein paar Packwagen (auch 4-Achser) gebaut.
Momentan drucke ich die BDZ-Dieselloks der Baureihen 75, 76 und 77 im Massstab 1:45. Dazu benötige ich die Drehgestelle mit Antrieb und ich denke, dass die Konstruktion für die Triebwagenantriebe durchaus verwendbar wäre.
Dazu meine Frage: könnte man die entsprechenden STL-Dateien von Ihnen bekommen (auch gegen Bezahlung), um die Brauchbarkeit auszuprobieren?
Antwort gerne an gerhardherold3@web.de
Danke und freundliche Grüsse
G. Herold