
Hallo Leute.
Nach längerer Pause gibt es etwas neues von meiner Drehscheibe zu berichten. Und zwar gleich was heftiges. Die Scheibe bekommt eine µC Steuerung statt einfach nur auf Sicht gefahren zu werden. Ein Kollege hat mir den Floh ins Ohr gesetzt, die Steuerung der Drehscheibe doch mit einem Arduino zu machen, der einen Stepper Motor steuert. Damit wird das punktgenaue Anhalten der Scheibe natürlich viel einfacher und komfortabler. Wer nicht weiß, was Arduino ist, der kann gerne mal bei Wikipedia vorbeischauen.
Allerdings habe ich mal sowas von gar keine Ahnung vom Arduino programmieren. Außerdem hatte ich das Ganze immer für viel zu teuer gehalten. Doch dem ist gar nicht so. Die komplette Hardware zum Steuern der Drehscheibe ist für etwa 10€ zu bekommen. Zum Einsatz wird ein Arduino Nano Klon aus China kommen, der etwa für 3-5€ zu bekommen ist. Dazu ein Stepper Motor vom Typ 28BYJ-48. Diese gibt es im 5-er Pack für etwa 10€ incl Treiber- Platine. Zusätzlich benötigt man noch einen OptoKoppler über der der Arduino die DCC Befehle verstehen und auswerten kann. Die sind für ca 1€ pro Stück zu bekommen und werden ebenfalls benötigt, wenn man mit einem Arduino z.B. einen mehrfach Servo Decoder (12 bis 16 Servos sind an einem Arduino möglich, habe ich gelernt) aufbauen will oder ähnliches. Damit man die Scheibe auch lokal vor Ort ohne DCC steuern kann, kommt auch noch ein 16er Folien- Tastaturfeld zum Einsatz. Die liegen im 5-er Pack bei etwa 6€. Ein 5 Volt Relais wird dann noch zum automatischen Umpolen des Bühnengleises dazu kommen, ebenfalls ca 1€. Der “Rest” ist Software und zwar kostenlose OpenSource Software.
Ich habe mir erst mal ein Einsteiger- Kit mit allem möglichen Zubehör bestellt, damit ich anfangen kann, das Programmieren zu lernen. Arduino Programme werden “Sketch” genannt, um sie von “richtigen” Programmen für z.B. PC zu unterscheiden. In diesem Kit war auch ein solcher Stepper Motor enthalten.
Der Stepper Motor hat eine Auflösung von 2048 Schritten pro Umdrehung. Durch die Übersetzung von etwa 1:4 an der Drehscheibe sind es also 8192 Schritte pro Umdrehung der Bühne. Das entspricht einer Genauigkeit von 0,04° und sollte ausreichen. Bei Microsteps werden die Steps noch mal unterteilt. Damit kann man erheblich genauere Positionierung erreichen, das ist jedoch deutlich komplexer anzusteuern. Der 28BYJ-48 hat ja schon ab Werk ein internes 1:64 Getriebe. Dazu das 1:4 der Drehscheibe ergibt eine Übersetzung von 1:256. Damit hat der kleine, billige Stepper Motor ein enormes Drehmoment und eine üppige Kraft. In dieser Beziehung mache ich mir gar keine Sorgen… Außerdem ist er sehr leise, vibriert nur etwas. Man sollte ihn also ggfs. mit einer Schwingungsdämpfung einbauen. Ich weiß von Leuten, die eine Drehscheibe in 1:22,5 mit diesem Motor antreiben. Auch dabei kommt er nicht an seine Grenzen…
Der Motor kann auf eine Geschwindigkeit von 1 U/min (am Ausgang des internen Getriebes) eingestellt werden. Zusammen mit dem Getriebe der Drehscheibe bedeutet das, die Bühne braucht etwa 4 Minuten für eine Umdrehung. Das sollte reichen. Schneller geht ganz leicht, langsamer ist wieder aufwändiger, aber auch möglich.
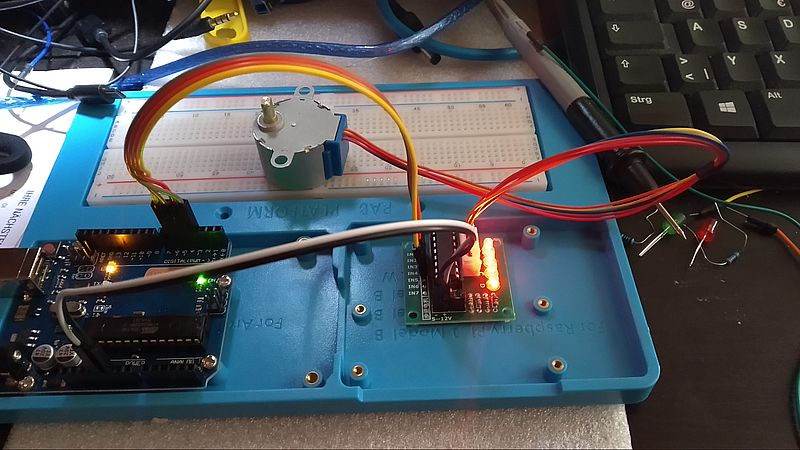
Hier sieht man den ersten Test- Aufbau. Links unten ist das Arduino Board zu sehen. rechts ist der Treiber für den Stepper Motor, der oben in der Mitte auf dem Steckbrett liegt. Per Sketch kann ich bereits den Motor langsam oder schnell in beide Richtungen um eine definierte Anzahl von Steps drehen lassen. Zuvor habe ich natürlich die Test- Aufbauten mit LED und Tastern hinter mich gebracht, um die grundsätzliche Funktion zu verstehen. Zum Testen kann man den Stepper Motor ohne weiteres direkt an den Arduino anschließen. Beim Einsatz auf der Anlage wird er aber separat mit 5 Volt versorgt werden.
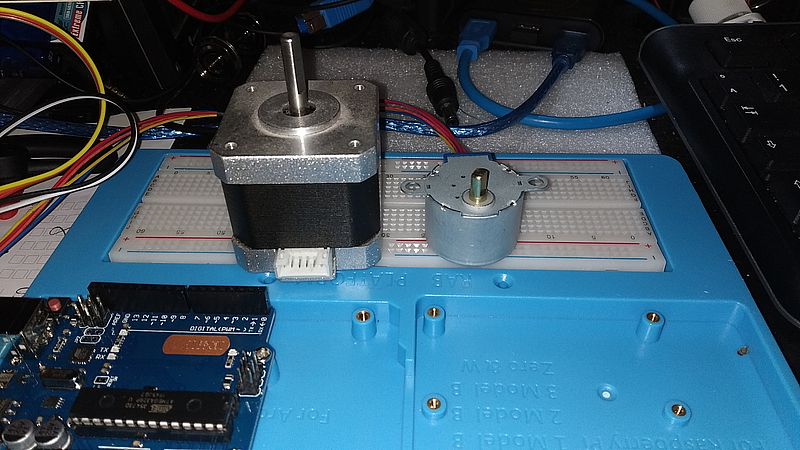
Oben sieht man den 28BYJ-48 neben einem Nema 17 Stepper Motor, der vielen wohl aus 3D Druckern oder ähnlichem bekannt sein dürfte. Der 28BYJ-48 ist um ein gutes Stück kleiner und lässt sich also viel besser unterbringen.
Am Anfang musste ich ein wenig experimentieren, da der Original- Getriebemotor eine 3 mm Welle hat, der 28BYJ-48 hat aber, wie alle gängigen Stepper- Motoren eine 5 mm Welle. ich wollte nach Möglichkeit das Original- Ritzel weiter verwenden, damit das 1:4 Getriebe in der Drehscheibe auch weiterhin verwendet werden kann. Mit einer 5 mm Welle hätte ich ein neues Ritzel mit deutlich mehr Zähnen besorgen müssen. Damit wäre ein guter Teil der Übersetzung des Drehscheiben- Getriebes verloren gegangen.
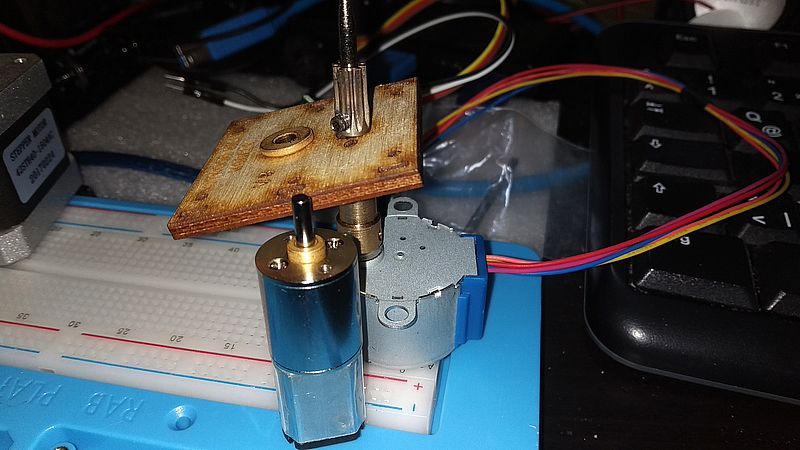
Am Anfang habe ich die nicht verwendete Fräser- Aufnahme, die bei meiner Fräse ursprünglich dabei war, ausprobiert. Zur Not wäre das gegangen, auch wenn die eine Seite einen Durchmesser von 3,2 mm hat.

Als Welle verwende ich einen abgenutzten Fräser, der entsprechend gekürzt wird. Er hat genau 3 mm Durchmesser und besteht aus gehärtetem Stahl. Auf das Kürzen freue ich mich jetzt schon…
Ich habe mich dann aber doch schnell dazu entschlossen, eine passende Wellenkupplung mit 3 auf 5 mm zu kaufen. Das erscheint mir dann doch solider… Auch mit so einer langen Kupplung dazwischen, baut der Stepper nur wenig tiefer als der Original- Getriebemotor, der beim Bausatz dabei liegt:
Bevor die Probiererei mit dem Arduino los geht, habe ich mich erst mal an den mechanischen Umbau der Drehscheibe auf Stepper- Antrieb gemacht. Dazu habe ich ein 3D Objekt in OpenSCAD konstruiert, um den Stepper an die Drehscheibe montieren zu können. Die Datei habe ich gleich parametrierbar gemacht, so das man unterschiedliche Dicken und Durchmesser des Wellen- Ausschnitts drucken kann, ohne noch mal Hand an die Konstruktion legen zu müssen.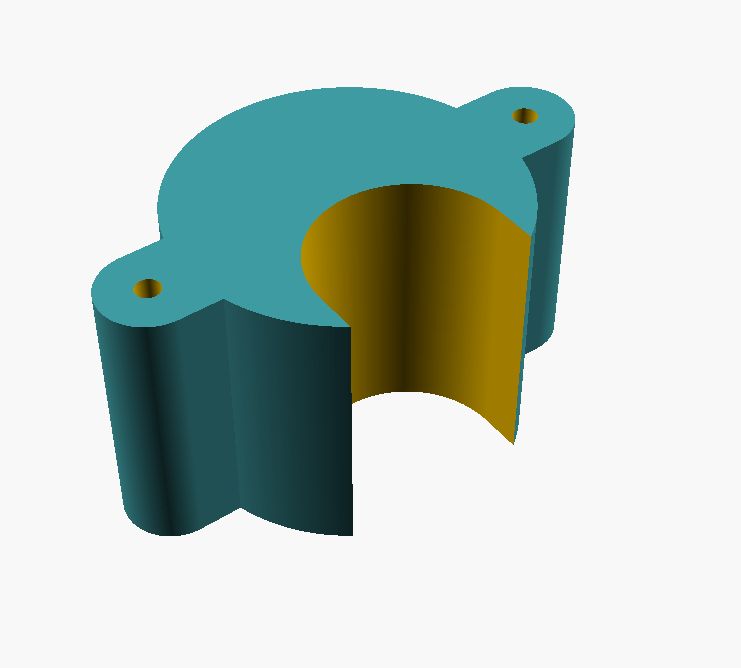
Für solche Objekte ist OpenSCAD ideal. Man muss nicht umständlich mit der Maus klicken, ziehen und verschieben und weiß danach trotzdem nicht, ob das Objekt die gewünschten Abmessungen präzise einhält. In OpenSCAD “programmiert” man einfach ein paar “Primitives” also einfache geometrische Objekte. Diese kann man beliebig skalieren, platzieren und per Bool- Operation kombinieren oder auch voneinander abziehen. Der Abstandshalter oben besteht nur aus Zylindern und Quadern. So sieht das Script für das Objekt oben aus:
$h=22; // Höhe des Halters
$r=8; // Radius des Ausschnitts
$g=300; // Glättung – Kleiner Wert = stufige Rundungen, großer Wert = lange Renderzeit. So zwischen 100 und 300 ist ok.
difference() {
union() {
difference() {
cylinder(h=$h, r=14, $fn = $g, center=false);
translate([8,0,-1])cylinder(h=$h+2, r=$r, $fn = $g, center=false);
translate([8,-$r,-1])cube(size=[2*$r+4,2*$r,$h+2]);
}
translate([0,17,0])cylinder(h=$h, r=4, $fn = $g, center=false);
translate([-4,9,0])cube(size=[8,8,$h]);
translate([0,-17,0])cylinder(h=$h, r=4, $fn = $g, center=false);
translate([-4,-17,0])cube(size=[8,8,$h]);
}
translate([0,-17.1,-1])cylinder(h=$h+2, r=1, $fn = $g, center=false);
translate([0,17.1,-1])cylinder(h=$h+2, r=1, $fn = $g, center=false);
}
Das Skript hat mich, obwohl ich nicht in Übung bin und schon länger nichts mit OpenSCAD gemacht habe, keine 20 Minuten gekostet.
Diesen Halter habe ich dann als .STL Datei exportiert, um ihn mit meinem 3D Drucker auszudrucken.
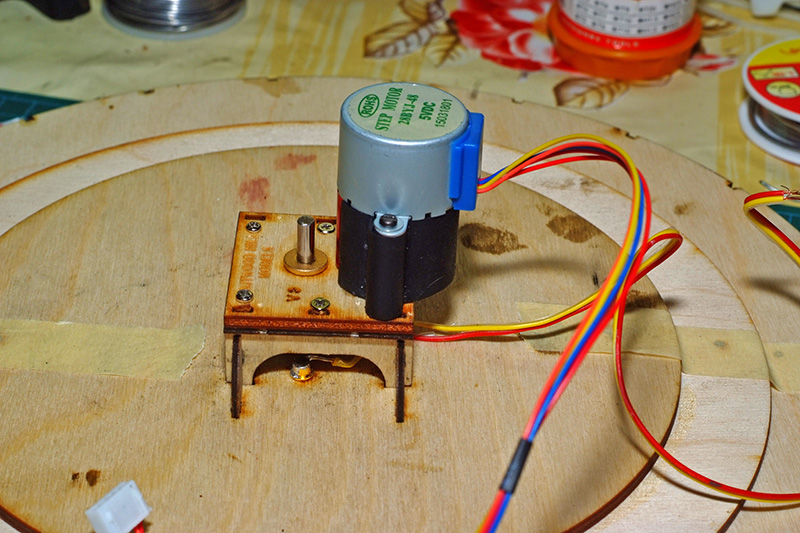
Hier noch mal der Original- Antrieb.

Der verwendete 3 Volt Getriebemotor wird durch einen Stepper- Motor ausgetauscht.
Hier ein Blick auf die Einzelteile für den Umbau:
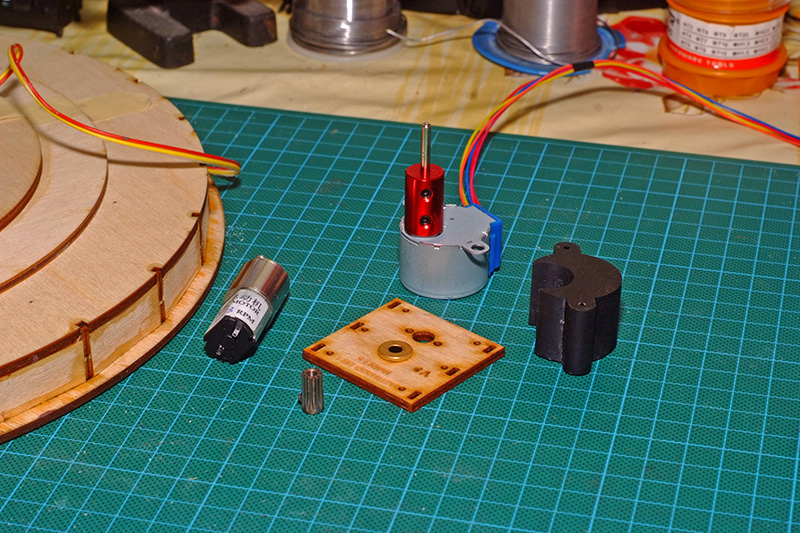
Rechts ist das gedruckte Teil. Im Hintergrund der Stepper- Motor mit bereits montierter Wellen- Kupplung und dem bereits passend gekürzten alten Fräser als neue Ritzel- Welle. In der Mitte liegt die Lagerplatte für den Drehscheiben- Antrieb, so wie sie im Bausatz dabei ist. Davor ist das Original- Ritzel, welches weiter verwendet wird. Links neben der Drehscheibe liegt der Original- Motor, der sicher für einen anderen Zweck demnächst gute Dienste leisten wird.
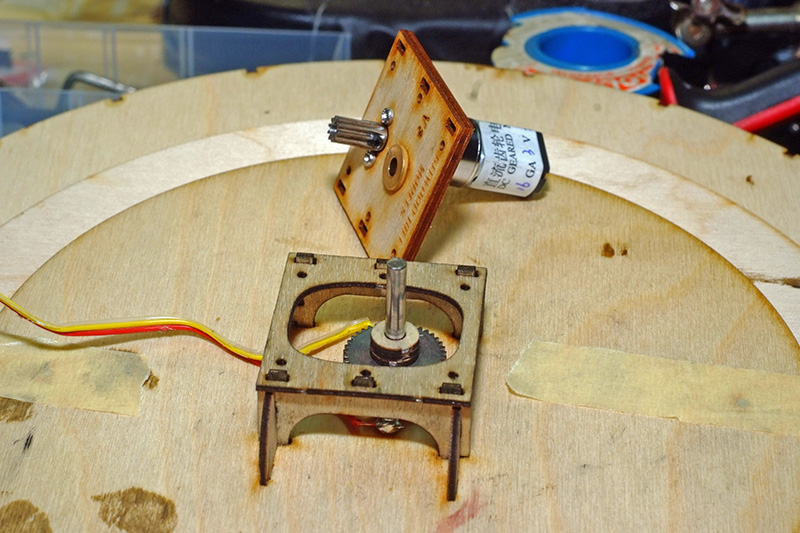
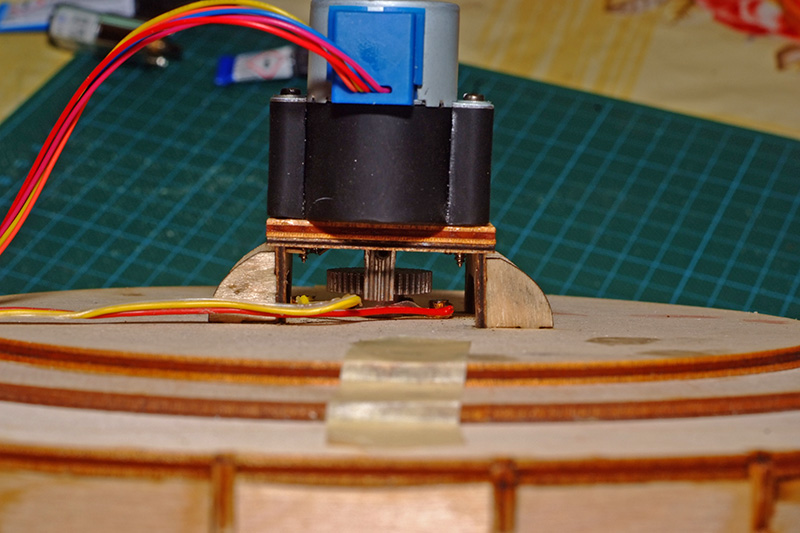
Der Stepper- Motor wird mit dem gedruckten Teil verschraubt. Das wiederum ist erst mal mit Sekundenkleber auf der Lagerplatte fixiert. Bevor die Scheibe endgültig eingebaut wird, schraube ich das Ganze zusätzlich mit zwei kleinen selbstschneidenden Schrauben zusammen. Außerdem wird das Getriebe noch ein wenig geschmiert, damit ales gut läuft. Da die Befestigungsschrauben am Motor einen kleineren Durchmesser haben, als die Bohrungen in den Befestigungsösen, kann ich den Antrieb bei Bedarf noch justieren.
Der neue Antrieb ist nur 2 mm höher (eigentlich tiefer, da er ja nach unten weist) als der Original- Antrieb. Das stellt also gar kein Problem dar.
Der mechanische Umbau ist nicht aufwändig, aber von einem einfachen Drehen des Motors bis hin zu einer komfortablen Drehscheiben- Steuerung ist es natürlich noch ein weiter und steiniger Weg.
Damit ist der mechanische Umbau abgeschlossen. Alles was jetzt folgt ist das Zusammenbauen und Programmieren der Arduino Steuerung. Dazu werde ich einen eigenen Beitrag verfassen.
Zum Schluss noch ein kleines Video vom ersten Test der Scheibe mit Stepper- Antrieb:
Die Drehscheibe arbeitet nahezu lautlos. Man hört eigentlich nur meinen Atem. Wenn ich das so mit dem Krach vergleiche, den seinerzeit meine Fleischmann H0 Drehscheibe gemacht hat…
Die Geschwindigkeit lässt sich übrigens noch deutlich reduzieren, falls nötig. Aktuell dauert eine 360° Drehung ziemlich genau eine Minute. Als Sketch auf dem Arduino läuft das Beispiel “Stepper_2” von der MoBaTools Bibliothek.
Moin und Danke für Ihre Arbeit.
Ich selber habe mir die Aufgabe gestellt eine 16m Drehscheibe zu bauen, da es auf dem Markt keine passende
zu einem annehmbaren Preis gibt.
Bei Ihrer Steuerung und meinen minimalen Kenntnissen von Arduino habe ich eine Frage zum Anschluß
der Taster.
Sie haben auch keinen Motor Treiber verbaut. Auch da sind meine Kenntnisse eher mau.
Wenn ich den Sketch richtig lese sind drei Anschlüsse vom Motor an 5,6,und 7 angeschlossen,
was ist mit dem Rest?
Herzlichen Dank für eine Antwort
Thomas Kuehn
Hallo.
Der 28BYJ-48 Stepper-Motor, den ich für die Drehscheibe verwende ist eigentlich nur ein “Halber”. Trotzdem reicht er locker für die Drehscheibe aus. Allerdings habe ich es aufgegeben, den Arduino Sketsch selbst zu schreiben. Auf Grund von persönlichen Umständen hat sich der Bau meiner Anlage sowieso erheblich verzögert. Währenddessen bin ich im Stummi Forum über ein Projekt zur Steuerung von Drehscheiben mit Arduino und Stepper Motor “gestolpert”.
https://www.stummiforum.de/t188668f7-MobaLedLib-Hard-und-Software-zur-Steuerung-einer-Drehscheibe-per-Schrittmotor.html
Ich verwende deswegen nun die Steuerung von dort. Tatsächlich werde ich in den nächsten Wochen anfangen, die Platine, die ich schon seit geraumer Zeit hier liegen habe, aufzubauen und zu bestücken. Diese Platinen bekommt man im Stummi Forum oder man kann sie sich auch selbst anfertigen lassen. Die entsprechenden Dateien sind frei verfügbar. Ich habe seinerzeit gleich 50 Stück in China fertigen lassen und eine Sammelbestellung organisiert. So ein oder zwei Platinen mehr als ich für mich haben wollte, sind übrig geblieben, was aber nicht schlimm ist. Zur Zeit ist ein anderer Stepper- Treiber unterwegs aus China, der besser sein soll als die Standart- Teile, die man so kennt. Der Treiber wird aber nur gesteckt und ist Pin- Kompatibel, so kann ich die Schaltung aufbauen und ausprobieren, während der Treiber seine Reise von China nach Deutschland bewältigt. Dann wird es hier auch einen Bericht dazu geben.